|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TRIKE - Gewichtskraftgesteuertes Ultraleichtflugzeug |
|||||||||||||||||||||
|
|
 |
||||||||||||||||||||
|
|
||||||||||||||||||||
|
|
|
|
Canon eos 400d Digital (10,1 Megapixel, CMOS)
|
Zoom Objektiv EF-S 18-55 f/3,5-5,6 |
|
|
|
|
Rollei dr 5 |
Sony DSC-F 826 Cybershot
|
|
|
|
|
|
Messvorrichtung (1) Nachbau der
Uni Frankfurt Ermöglicht eine
|
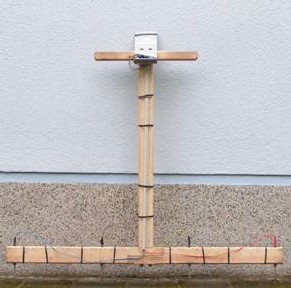
Messvorrichtung (2) Konfiguration: Pol-Pol Konstruktion: Leichter Zweispieß aus Kunststoffrohr Eine zweiadrige Leitung ins Unendliche Messvorgang: konventionell handgeführt Messgeschwindigkeit:
|
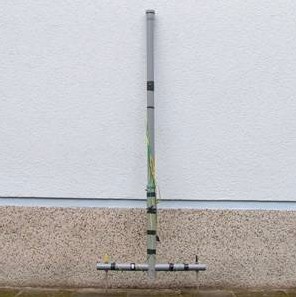
Roll-Messwagenkonstruktion Konfiguration: Pol-Pol Konstruktion: Zweirad-Messwagen mit 18 Spike-Spießen/Rad Eine zweiadrige Leitung ins Unendliche Messvorgang: Messauslösung in der konstanten Bewegung so dass Messauslösung über Messpunkt erfolgt Messgeschwindigkeit:
|
|
|
Wärmebildkamera
|
|
Wärmebildkamera |
|
|
|
|
|
Wärmebildkamera |
Wärmebildkamera |
|
|
|
|
Digitaler Videorekorder |
Messkoffer |
|
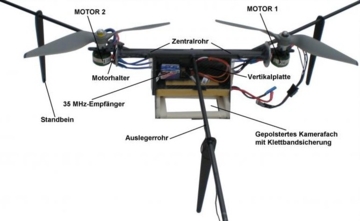
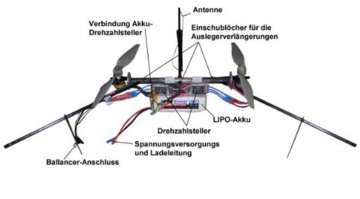
Gefesseltes Propellerschwebesystem |
|
|
|
|
|
|
|
|
ARCHAEO-OPTERIX: |
|
|
|
|
|
Sony GPS-CS1 KA GPS-Tracker Zum verknüpfen der Bilddateien mit GPS Koordinaten Anschließend werden die Positionsprotokolldaten mithilfe der Software „Picture Motion Browser“ zu den EXIF-Daten der Bilddateien hinzugefügt.
|
|
Tragflächen-Kamerahalter (Eigenbau) |
|
|
|
|
|
|
Technische Details
Maximalgeschwindigkeiten
|
|
Multikopter "Phantom" |
|
|
3-Flugmodi
Intelligente Ausrichtungssteuerung
"Position halten" - Funktion
Notlauffunktionen
|
|
|
Multikopter "Phantom" |
|
Kameras
|
Kamerabefestigung
|
archaeoflug 2013